–Я—А–Є–љ—Ж–Є–њ—Л –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П (–Ґ–µ–Љ–∞)
–Ю—В–Ї–ї–Њ–љ–µ–љ–Є—П
–≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л –Њ—В —В—А–µ–±—Г–µ–Љ–Њ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П –≤–Њ–Ј–љ–Є–Ї–∞—О—В –Є–Ј-–Ј–∞ –љ–∞–ї–Є—З–Є—П –≤–Њ–Ј–Љ—Г—Й–∞—О—Й–Є—Е –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–є F(t),
–њ–Њ—Б—В—Г–њ–∞—О—Й–Є—Е –≤ —Б–Є—Б—В–µ–Љ—Г –≤ –≤–Є–і–µ –љ–∞–≥—А—Г–Ј–Ї–Є –љ–∞ –Њ–±—К–µ–Ї—В, –Є–Ј–Љ–µ–љ–µ–љ–Є–є –љ–∞–њ—А—П–ґ–µ–љ–Є—П –њ–Є—В–∞—О—Й–µ–є
—Б–µ—В–Є –Є –і—А.
–Т–Њ–Ј–Љ—Г—Й–∞—О—Й–Є–µ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є—П
F(t) –Љ–Њ–≥—Г—В –±—Л—В—М —А–∞–Ј–ї–Є—З–љ–Њ–≥–Њ —Е–∞—А–∞–Ї—В–µ—А–∞:
- –Ї–Њ–Њ—А–і–Є–љ–∞—В–љ—Л–Љ–Є F–Ї(t),
–Ї–Њ—В–Њ—А—Л–µ –Є–Ј–Љ–µ–љ—П—О—В –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ –Ї–Њ–Њ—А–і–Є–љ–∞—В—Г Y(t);
- –њ–∞—А–∞–Љ–µ—В—А–Є—З–µ—Б–Ї–Є–Љ–Є F–њ(t),
–њ—А–Є –і–µ–є—Б—В–≤–Є–Є –Ї–Њ—В–Њ—А—Л—Е –Є–Ј–Љ–µ–љ—П—О—В—Б—П –њ–∞—А–∞–Љ–µ—В—А—Л –Њ–±—К–µ–Ї—В–∞ –Є –Р–£–£ (—В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –Њ–Ї—А—Г–ґ–∞—О—Й–µ–є
—Б—А–µ–і—Л, —Б—В–∞—А–µ–љ–Є–µ –Ї–Њ–Љ–њ–ї–µ–Ї—В—Г—О—Й–Є—Е —Н–ї–µ–Љ–µ–љ—В–Њ–≤ –Є –і—А.).
–Э–∞
–≤—Е–Њ–і –Р–£–£ –њ–Њ–і–∞–µ—В—Б—П –Ј–∞–і–∞—О—Й–∞—П –≤–µ–ї–Є—З–Є–љ–∞ X3(t), –Ј–∞–Ї–Њ–љ –Ї–Њ—В–Њ—А–Њ–є –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П
–∞–ї–≥–Њ—А–Є—В–Љ–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П –°–Р–£, —В.–µ.
Y(t) = f (X3(t)) .                                                                                                                        (1)
–Ґ–µ–њ–µ—А—М
–Љ–Њ–ґ–љ–Њ —Б—Д–Њ—А–Љ—Г–ї–Є—А–Њ–≤–∞—В—М –≥–ї–∞–≤–љ—Г—О –Ј–∞–і–∞—З—Г —Г–њ—А–∞–≤–ї–µ–љ–Є—П: –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Њ–±–µ—Б–њ–µ—З–Є—В—М
–Љ–Є–љ–Є–Љ–∞–ї—М–љ—Г—О –≤–µ–ї–Є—З–Є–љ—Г –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П вИЖY(t) –≤—Л—Е–Њ–і–љ–Њ–≥–Њ –њ–∞—А–∞–Љ–µ—В—А–∞ –Њ–±—К–µ–Ї—В–∞ Y(t) –Њ—В –µ–µ
—В—А–µ–±—Г–µ–Љ–Њ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П Y—В—А(t) , —В.–µ. –≤ –њ–µ—А–≤–Њ–Љ –њ—А–Є–±–ї–Є–ґ–µ–љ–Є–Є:
Y(t) - Y—В—А(t) = ¬љ¬± DY(t)¬љ¬Ѓ min.¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† (2)
–Ю–і–љ–∞–Ї–Њ
–≤ —В–µ–Њ—А–Є–Є –њ—А–Є–љ—П—В–Є—П —А–µ—И–µ–љ–Є–є –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ DY(t) –љ–µ –≤—Б–µ–≥–і–∞ –і–∞–µ—В –Њ–±—К–µ–Ї—В–Є–≤–љ—Г—О –Њ—Ж–µ–љ–Ї—Г –і–Њ—Б—В–∞—В–Њ—З–љ–Њ—Б—В–Є
—Г–њ—А–∞–≤–ї–µ–љ–Є—П –Є–ї–Є —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П. –Я–Њ—Н—В–Њ–Љ—Г –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤–µ—А–Њ—П—В–љ–Њ—Б—В–љ–∞—П –≤–µ–ї–Є—З–Є–љ–∞
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П –Њ—В —В—А–µ–±—Г–µ–Љ–Њ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П –њ–Њ –Љ–Є–љ–Є–Љ—Г–Љ—Г —Б—Г–Љ–Љ—Л –Ї–≤–∞–і—А–∞—В–Њ–≤ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–є
![]() .                                                  (3)
.                                                  (3)
–Ф–ї—П
—Н–Ї–Њ–љ–Њ–Љ–Є—З–µ—Б–Ї–Є—Е —Г—Б–ї–Њ–≤–Є–є –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В—М –Њ—Ж–µ–љ–Ї–Є –і–Њ—Б—В–∞—В–Њ—З–љ–Њ—Б—В–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П,
–Є—Б—Е–Њ–і—П –Є–Ј –Ї—А–Є—В–µ—А–Є–µ–≤ —Н–Ї–Њ–љ–Њ–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ —Н—Д—Д–µ–Ї—В–∞, –≤—А–µ–Љ–µ–љ–Є –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –Њ–њ–µ—А–∞—Ж–Є–є –Є
–і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л—Е —Г—Б–ї–Њ–≤–Є–є, —З—В–Њ –Њ—В—А–∞–ґ–∞–µ—В—Б—П –≤ —Б–ї–µ–і—Г—О—Й–µ–Љ –≤—Л—А–∞–ґ–µ–љ–Є–Є:
![]() ,                                                                                     (4)
,                                                                                     (4)
–≥–і–µ C1i, C2i, C3i
- –Ї–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В—Л, —Г—З–Є—В—Л–≤–∞—О—Й–Є–µ —Н–Ї–Њ–љ–Њ–Љ–Є—З–µ—Б–Ї–Є–є —Н—Д—Д–µ–Ї—В, –Ј–∞—В—А–∞—В—Л –≤—А–µ–Љ–µ–љ–Є –Є
–і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –Њ–њ–µ—А–∞—Ж–Є–є —Г–њ—А–∞–≤–ї–µ–љ–Є—П.
–Ю—В–Ї–ї–Њ–љ–µ–љ–Є–µ
DY(t) –њ—А–Њ—П–≤–ї—П–µ—В—Б—П –≤ —Б–Є—Б—В–µ–Љ–µ –≤
—А–µ–Ј—Г–ї—М—В–∞—В–µ –і–µ–є—Б—В–≤–Є–є –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є–є F(t), –∞ —В–∞–Ї–ґ–µ –Є–Ј–Љ–µ–љ–µ–љ–Є—П—Е –≤–Њ –≤—А–µ–Љ–µ–љ–Є –≤–µ–ї–Є—З–Є–љ—Л X3(t).
–Я—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є X3(t) –≤—Л—Е–Њ–і–љ–∞—П –≤–µ–ї–Є—З–Є–љ–∞ Y(t) –љ–µ —Б—А–∞–Ј—Г –њ—А–Є–Љ–µ—В –љ—Г–ґ–љ–Њ–µ
–Ј–љ–∞—З–µ–љ–Є–µ Y—В—А(t), –∞ —Б–њ—Г—Б—В—П –љ–µ–Ї–Њ—В–Њ—А–Њ–µ –≤—А–µ–Љ—П –њ–Њ—Б–ї–µ –Њ–Ї–Њ–љ—З–∞–љ–Є—П
–њ–µ—А–µ—Е–Њ–і–љ–Њ–≥–Њ –њ—А–Њ—Ж–µ—Б—Б–∞. –Я–µ—А–µ—Е–Њ–і–љ—Л–є –њ—А–Њ—Ж–µ—Б—Б –Љ–Њ–ґ–µ—В –±—Л—В—М –Є –Ї–Њ–ї–µ–±–∞—В–µ–ї—М–љ—Л–Љ, –Ї–∞–Ї
–њ–Њ–Ї–∞–Ј–∞–љ–Њ –љ–∞ —А–Є—Б. 1.
 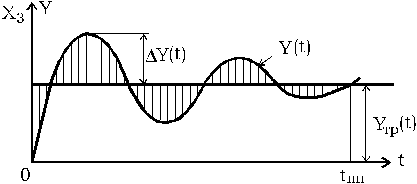
–†–Є—Б. 1. –Я–µ—А–µ—Е–Њ–і–љ–Њ–є –њ—А–Њ—Ж–µ—Б—Б
—А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П
–Т—Л—Е–Њ–і–љ–Њ–є
–њ–∞—А–∞–Љ–µ—В—А Y(t) –і–Њ—Б—В–Є–≥–љ–µ—В —В—А–µ–±—Г–µ–Љ–Њ–≥–Њ Y—В—А(t) –Ј–∞ –≤—А–µ–Љ—П –њ–µ—А–µ—Е–Њ–і–љ–Њ–≥–Њ
–њ—А–Њ—Ж–µ—Б—Б–∞ t–њ–њ.
–У–ї–∞–≤–љ—Л–є –њ—А–Є–љ—Ж–Є–њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Њ—Б—В–Њ–Є—В –≤ —В–Њ–Љ, —З—В–Њ–±—Л —Г–Љ–µ–љ—М—И–Є—В—М –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ
–≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л Y(t) –Њ—В —В—А–µ–±—Г–µ–Љ–Њ–є Y—В—А(t), —В.–µ.
Y(t) - Y—В—А(t) = ¬љќФY(t)¬љ¬Ѓ min.
–Я—А–Є–љ—Ж–Є–њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ–Њ –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є—О
–Я—А–Є –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є–Є F(t) –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ ќФYF(t).
–Х—Б–ї–Є –Ї–Њ–Љ–њ–µ–љ—Б–Є—А—Г—О—Й–µ–µ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ ќФYu(t) –±—Г–і–µ—В —А–∞–≤–љ—Л–Љ –њ–Њ –≤–µ–ї–Є—З–Є–љ–µ –Є
–Њ–±—А–∞—В–љ—Л–Љ –њ–Њ –Ј–љ–∞–Ї—Г ќФYF(t), —В–Њ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П –≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л –љ–µ –±—Г–і–µ—В:
ќФYF(t) = - ќФYu(t),¬† ќФY(t) = 0.¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† ¬†¬† (5)
–°—Е–µ–Љ–∞ –°–Р–£ —Б —Г–њ—А–∞–≤–ї–µ–љ–Є–µ–Љ –њ–Њ –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є—О –њ—А–Є–≤–µ–і–µ–љ–∞ –љ–∞ —А–Є—Б. 4.
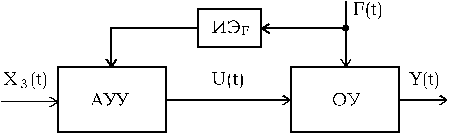
–†–Є—Б. 4. –§—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ —Б—Е–µ–Љ—Л –°–Р–£ –њ–Њ
–≤–Њ–Ј–Љ—Г—Й–µ–љ–Є—О:
–Ш–≠F - –Є–Ј–Љ–µ—А–Є—В–µ–ї—М–љ—Л–є —Н–ї–µ–Љ–µ–љ—В –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є—П
                                                                                                     
–Ф–ї—П —Г–Љ–µ–љ—М—И–µ–љ–Є—П
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П ќФYF(t), –≤—Л–Ј–≤–∞–љ–љ–Њ–≥–Њ –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є–µ–Љ F(t), –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є–µ
–Є–Ј–Љ–µ—А—П–µ—В—Б—П –Є –њ—А–µ–Њ–±—А–∞–Ј—Г–µ—В—Б—П –Р–£–£ –≤ —Г–њ—А–∞–≤–ї—П—О—Й–µ–µ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ U(t), –Ї–Њ—В–Њ—А–Њ–µ –≤—Л–Ј—Л–≤–∞–µ—В
–Ї–Њ–Љ–њ–µ–љ—Б–Є—А—Г—О—Й–µ–µ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ ќФYu(t), —А–∞–≤–љ–Њ–µ –њ–Њ –≤–µ–ї–Є—З–Є–љ–µ –Є –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ–љ–Њ–µ
–њ–Њ –Ј–љ–∞–Ї—Г –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—О ќФYF(t).
–Ґ–∞–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л –њ–Њ–ї–љ–Њ—Б—В—М—О
–Ї–Њ–Љ–њ–µ–љ—Б–Є—А—Г—О—В –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є–µ, –Њ–љ–Є —А–∞–Ј–Њ–Љ–Ї–љ—Г—В—Л–µ, –≤ –љ–Є—Е –љ–µ—В –њ—А–Њ–±–ї–µ–Љ —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є, –Њ—З–µ–љ—М
–±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤—Г—О—Й–Є–µ.
–Я—А–Є–љ—Ж–Є–њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ–Њ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—О
–Ф–ї—П —Г–Љ–µ–љ—М—И–µ–љ–Є—П
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П ќФY(t) –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –Є–Ј–Љ–µ—А–µ–љ–Є–µ —А–∞–Ј–љ–Њ—Б—В–Є –Љ–µ–ґ–і—Г –Ј–∞–і–∞–љ–љ—Л–Љ –Є —В–µ–Ї—Г—Й–Є–Љ
–Ј–љ–∞—З–µ–љ–Є—П–Љ–Є –≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л –Є –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –≤–µ–ї–Є—З–Є–љ—Л –Є –Ј–љ–∞–Ї–∞ —Н—В–Њ–≥–Њ
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ –љ–∞ –µ–µ —Г–Љ–µ–љ—М—И–µ–љ–Є–µ. –Х—Б–ї–Є
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ ќФY(t) –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є X3(t) –Є–ї–Є –њ–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—О
–≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л Y(t), —В–Њ –≤—Л—А–∞–±–∞—В—Л–≤–∞–µ—В—Б—П —Б–Є–≥–љ–∞–ї —А–∞—Б—Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є—П (—А–Є—Б. 5).
ќµ(t) = X3(t) - Xoc(t).¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† ¬†¬†¬†¬†¬†¬†¬†¬†¬† (6)
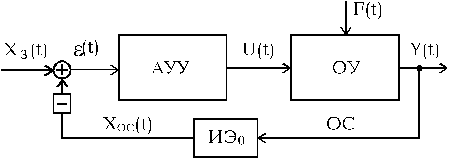
–†–Є—Б. 5. –§—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞ –°–Р–£ –њ–Њ
–Њ—В–Ї–ї–Њ–љ–µ–љ–Є—О:
ќµ(t) - —Б–Є–≥–љ–∞–ї —А–∞—Б—Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є—П; –Ш–≠–Њ - –Є–Ј–Љ–µ—А–Є—В–µ–ї—М–љ—Л–є —Н–ї–µ–Љ–µ–љ—В –Њ–±—А–∞—В–љ–Њ–є
—Б–≤—П–Ј–Є
–Ґ–∞–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л —Г–њ—А–∞–≤–ї—П—О—В
–≤—Л—Е–Њ–і–љ–Њ–є –≤–µ–ї–Є—З–Є–љ–Њ–є –љ–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ –Њ—В –њ—А–Є—З–Є–љ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П ќФY(t) (–љ–∞–≥—А—Г–Ј–Ї–∞,
—В–µ–Љ–њ–µ—А–∞—В—Г—А–∞, –Є–Ј–Љ–µ–љ–µ–љ–Є–µ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –Ј–≤–µ–љ—М–µ–≤ –Є —Н–ї–µ–Љ–µ–љ—В–Њ–≤). –Ю–і–љ–∞–Ї–Њ –њ—А–Є—Б—Г—В—Б—В–≤—Г–µ—В
–Њ–±—А–∞—В–љ–∞—П —Б–≤—П–Ј—М, —Н—В–Є —Б–Є—Б—В–µ–Љ—Л –Ј–∞–Љ–Ї–љ—Г—В—Л–µ –Є –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –њ—А–Њ–±–ї–µ–Љ–∞ —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є.
–°–Њ–≤—А–µ–Љ–µ–љ–љ—Л–µ –°–Р–£ –≤—Л—Б–Њ–Ї–Њ–є
—В–Њ—З–љ–Њ—Б—В–Є —Б—В—А–Њ—П—В—Б—П –љ–∞ –Њ—Б–љ–Њ–≤–µ —Б–Њ—З–µ—В–∞–љ–Є—П —Г–њ—А–∞–≤–ї–µ–љ–Є–є –њ–Њ –≤–Њ–Ј–Љ—Г—Й–µ–љ–Є—О, —В.–µ. –Ї–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞–љ–љ–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ (—А–Є—Б. 6).
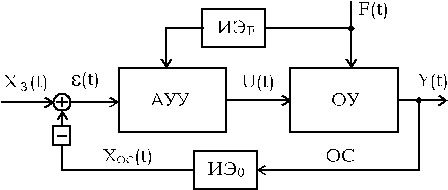
–†–Є—Б. 6. –§—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞
–Ї–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞–љ–љ–Њ–є –°–Р–£
–Ъ–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞–љ–љ–∞—П –°–Р–£ вАУ —Б–Є—Б—В–µ–Љ–∞, –≤ –Ї–Њ—В–Њ—А–Њ–є –≤—Е–Њ–і–љ—Л–Љ–Є
–≤–Њ–Ј–і–µ–є—Б—В–≤–Є—П–Љ–Є –µ–µ —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞ —П–≤–ї—П—О—В—Б—П –Ї–∞–Ї –≤–љ–µ—И–љ–Є–µ (–Ј–∞–і–∞—О—Й–µ–µ –Є
–≤–Њ–Ј–Љ—Г—Й–∞—О—Й–µ–µ), —В–∞–Ї –Є –≤–љ—Г—В—А–µ–љ–љ–µ–µ (–Ї–Њ–љ—В—А–Њ–ї—М–љ–Њ–µ) –≤–Њ–Ј–і–µ–є—Б—В–≤–Є—П.
–≠—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—М —А–∞–±–Њ—В—Л
–Ї–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞–љ–љ–Њ–є –°–Р–£ –≤—Б–µ–≥–і–∞ –±–Њ–ї—М—И–µ, —З–µ–Љ —Г –њ–Њ—А–Њ–Ј–љ—М —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А—Г—О—Й–Є—Е –Ј–∞–Љ–Ї–љ—Г—В–Њ–є –Є–ї–Є
—А–∞–Ј–Њ–Љ–Ї–љ—Г—В–Њ–є —Б–Є—Б—В–µ–Љ.